2026
SpatialLLM':' From Multi-modality Data to Urban Spatial Intelligence
Jiabin Chen*, Haiping Wang*, Jinpeng Li, Yuan Liu†, Zhen Dong†, Bisheng Yang
3D-Large Language Model
JAG(IF:8.6) 2026
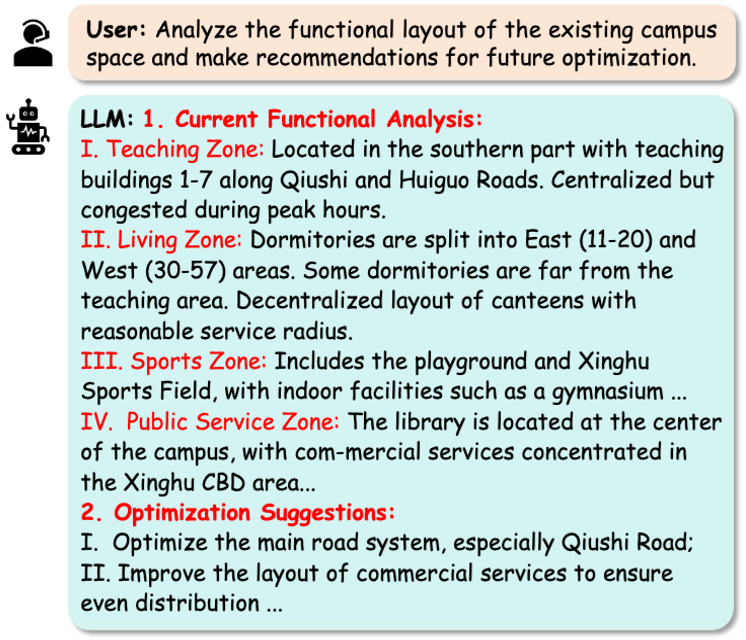
Structured descriptions of raw spatial data equip LLM with zero-shot execution of advanced spatial intelligence tasks, including urban planning, ecological analysis, traffic management, etc.. Multi-field knowledge, context length, and reasoning ability are key factors influencing LLM performances in urban analysis.
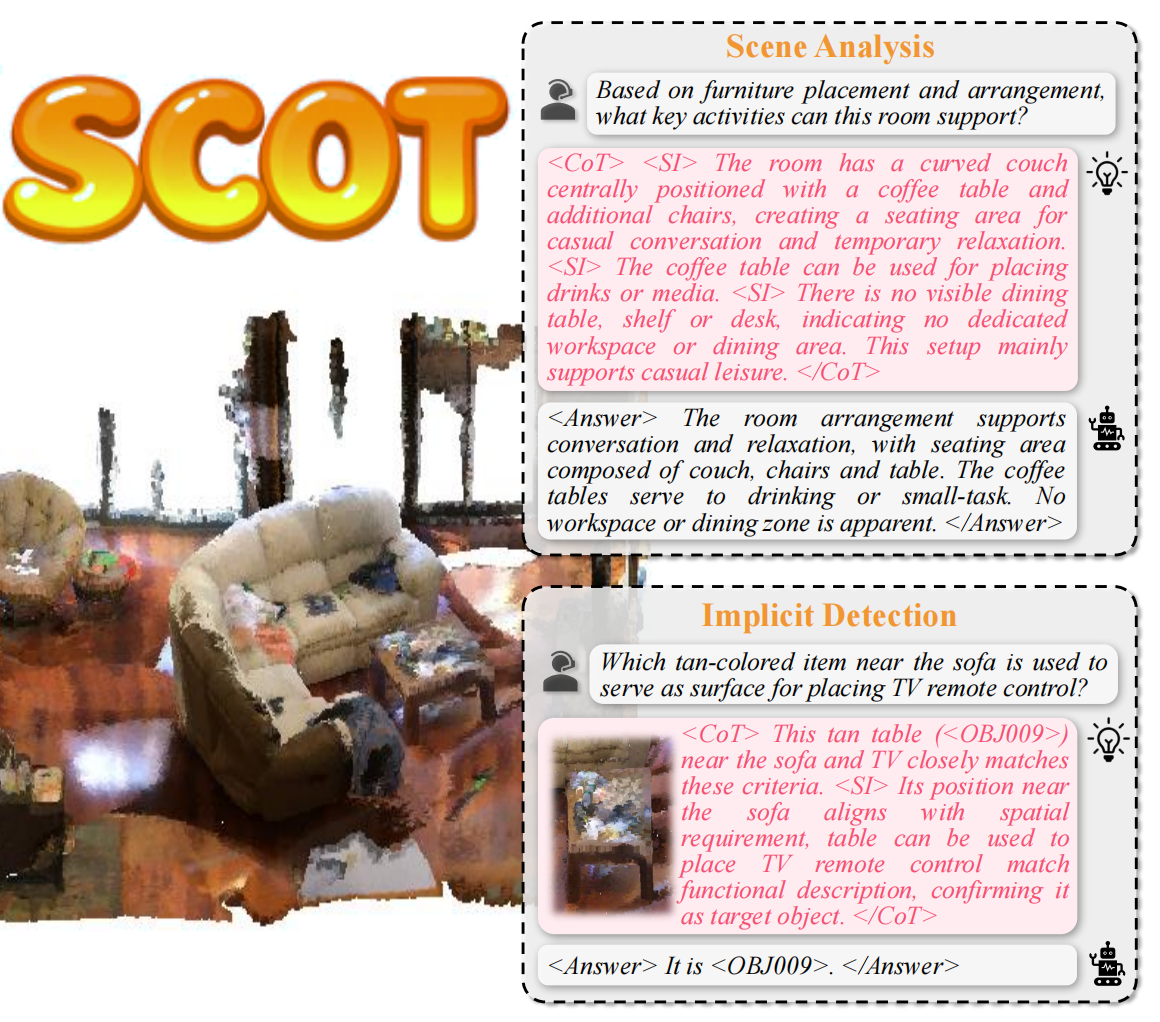
SCoT':' Teaching 3D-LLMs to Think Spatially with Million-scale CoT Annotations
Jinpeng Li*, Haiping Wang*, Jiabin Chen, Yuan Liu, Zhen Dong†, Bisheng Yang
3D-Large Language Model
International Conference on Learning Representations (ICLR) 2026
We present a million-scale 3D visual-language dataset with CoT annotations that unifies perception, analysis, and planning tasks to advance interpretable 3D intelligence..
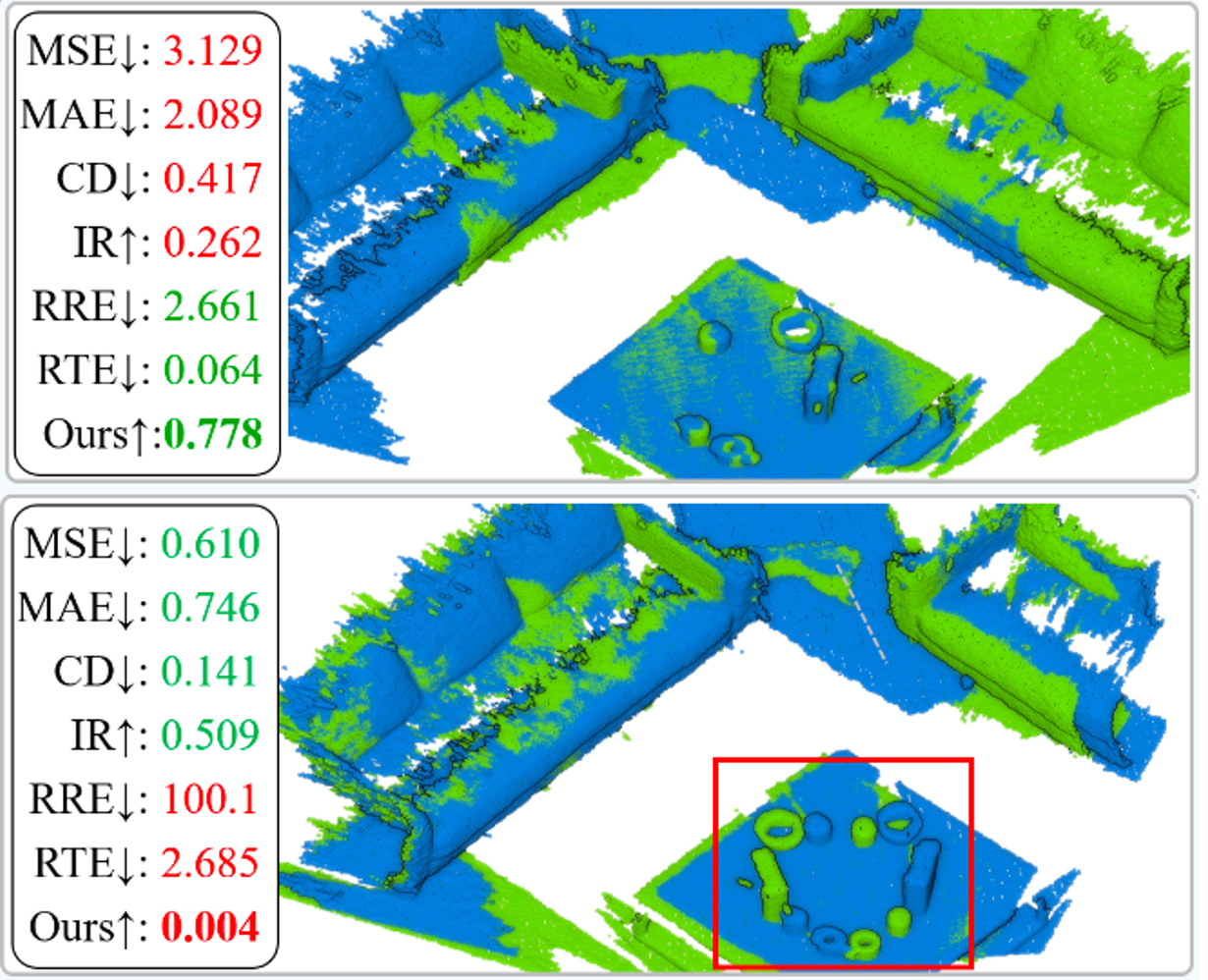
RegScorer ":" Learning to Select the Best Transformation of Point Cloud Registration
Xiaochen Yang*, Haiping Wang*, Yuan Liu, Bisheng Yang†, Zhen Dong
PC Pariwise Registration
ISPRS Journal of Photogrammetry and Remote Sensing (ISPRS J, IF:12.2) 2026
RegScorer learns to score the candidate transformations for more reliable selection in pairwise point cloud registration.
2025
GAGS':' Granularity-Aware 3D Feature Distillation for Gaussian Splatting
Yuning Pang*, Haiping Wang*, Yuan Liu†, Chenglu Wen, Zhen Dong†, Bisheng Yang
3D Open-vocabulary Understanding
AAAI 2026
GAGS learns a 3D Gaussian field associated with semantic features, which enables accurate open-vocabulary 3D visual grounding in the scene.

The Neural City':' A Next-generation Spatio-Temporal Intelligence Paradigm for Urban Holistic Governance
Zhen Dong*, Haiping Wang*, Zhe Chen, Chen Long, Yuning Peng, Yuan Liu, Fuxun Liang, Jian Zhou, Yiping Chen, Fan Zhang, Bisheng Yang†, Deren Li
Spatial Intelligence System
The Innovation (IF: 25.7) 2025
We outline Neural City to enable end-to-end urban governance, seamlessly linking raw urban data to holistic urban governance, achieving "6W+4R" governance.
VistaDream':' Sampling multiview consistent images for single-view scene reconstruction
Haiping Wang, Yuan Liu†, Ziwei Liu, Zhen Dong†, Wenping Wang, Bisheng Yang
Text/Image-to-3D Scene Generation
International Conference on Computer Vision (ICCV) 2025
VistaDream is a training-free framework to reconstruct a high-quality 3D scene from a single-view image. The key idea is to sample multi-view consistent high-quality images from pre-trained single-view diffusion models.
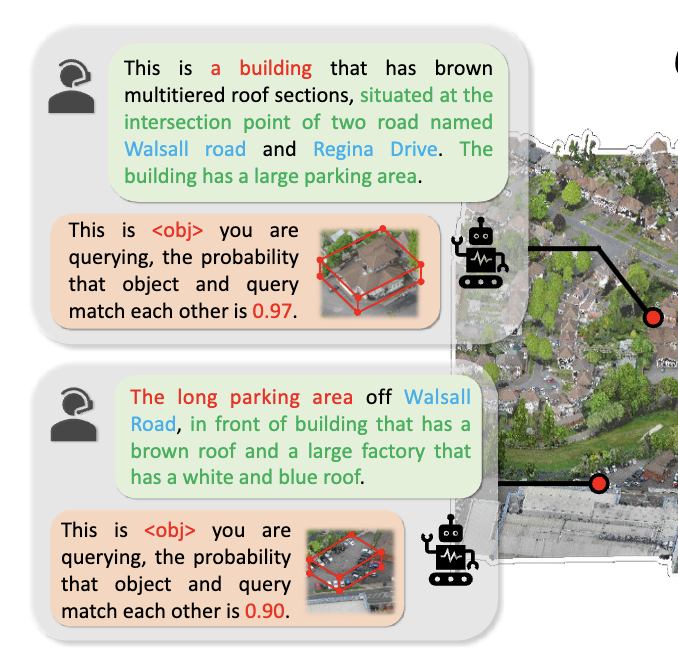
CityAnchor':' City-scale 3D Visual Grounding with Multi-modality LLMs
Jinpeng Li*, Haiping Wang*, Jiabin Chen, Yuan Liu†, Zhiyang Dou, Yuexin Ma, Sibei Yang, Yuan Li, Wenping Wang, Zhen Dong, Bisheng Yang†
3D-Large Language Model
International Conference on Learning Representations (ICLR) 2025
We present a two-stage (coarse-to-fine) 3D visual grounding system by tuning Large Vision Language Model (LVLM) to accurately find targets in city-scale point clouds from text descriptions.
2024
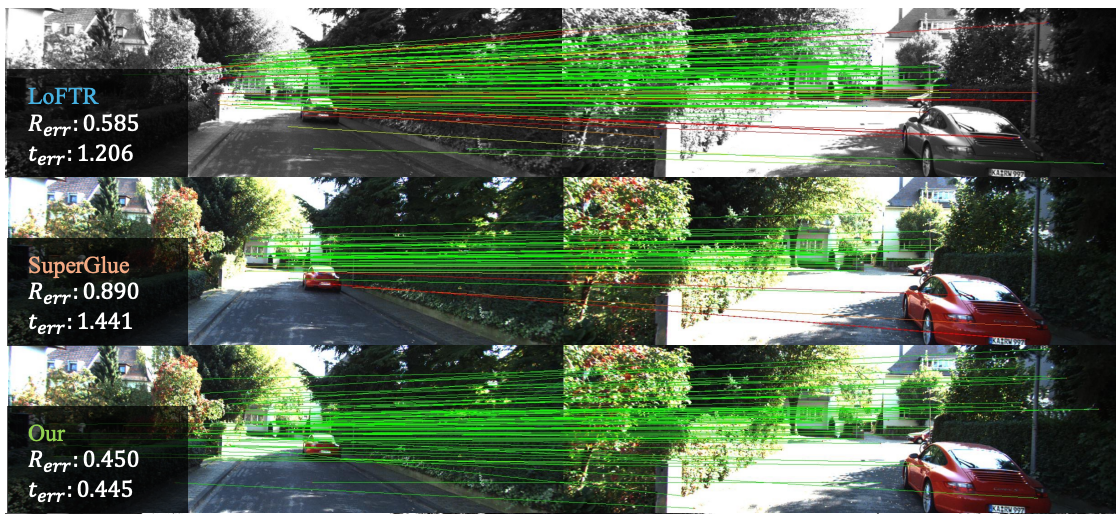
Exploiting Motion Prior for Accurate Pose Estimation of Dashboard Cameras
Yipeng Lu, Yifan Zhao, Haiping Wang, Zhiwei Ruan, Yuan Liu, Zhen Dong, Bisheng Yang
Image Registration
RA-L 2024
Improving image registration accuragy by encoding camera motion patterns.
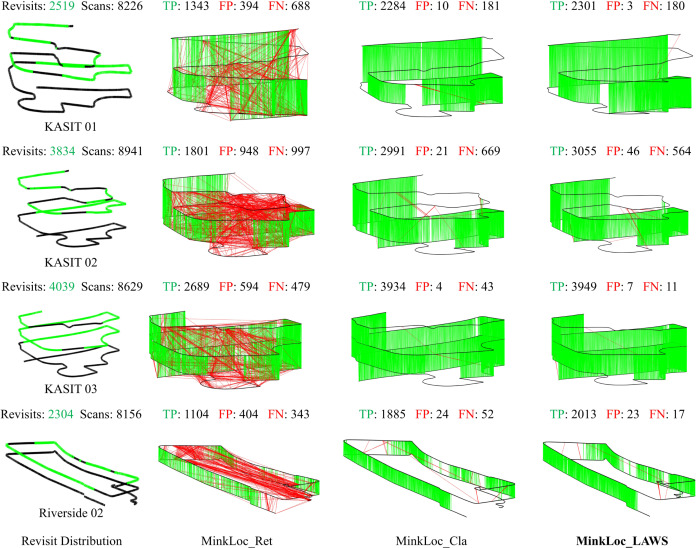
Look at the whole scene':' General point cloud place recognition by classification proxy
Yue Xie*, Bing Wang*, Haiping Wang, Fuxun Liang†, Wenxiao Zhang, Zhen Dong, Bisheng Yang
Point Cloud Localization
ISPRS Journal of Photogrammetry and Remote Sensing (IF: 12.7) 2024
Treat point cloud retrival as a classification problem.

SparseDC':' Depth Completion from sparse and non-uniform inputs
Chen Long, Wenxiao Zhang, Zhe Chen, Haiping Wang, Yuan Liu, Zhen Cao, Zhen Dong†, Bisheng Yang
Depth Completion
Information Fusion (IF: 18.6) 2024
Depth completion from sparse and non-uniform inputs.
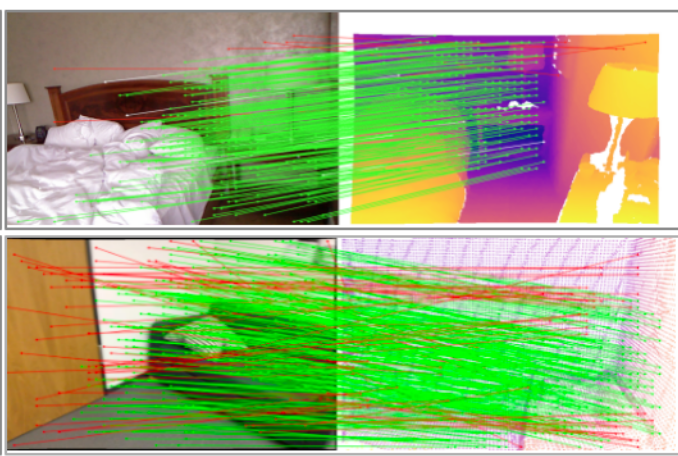
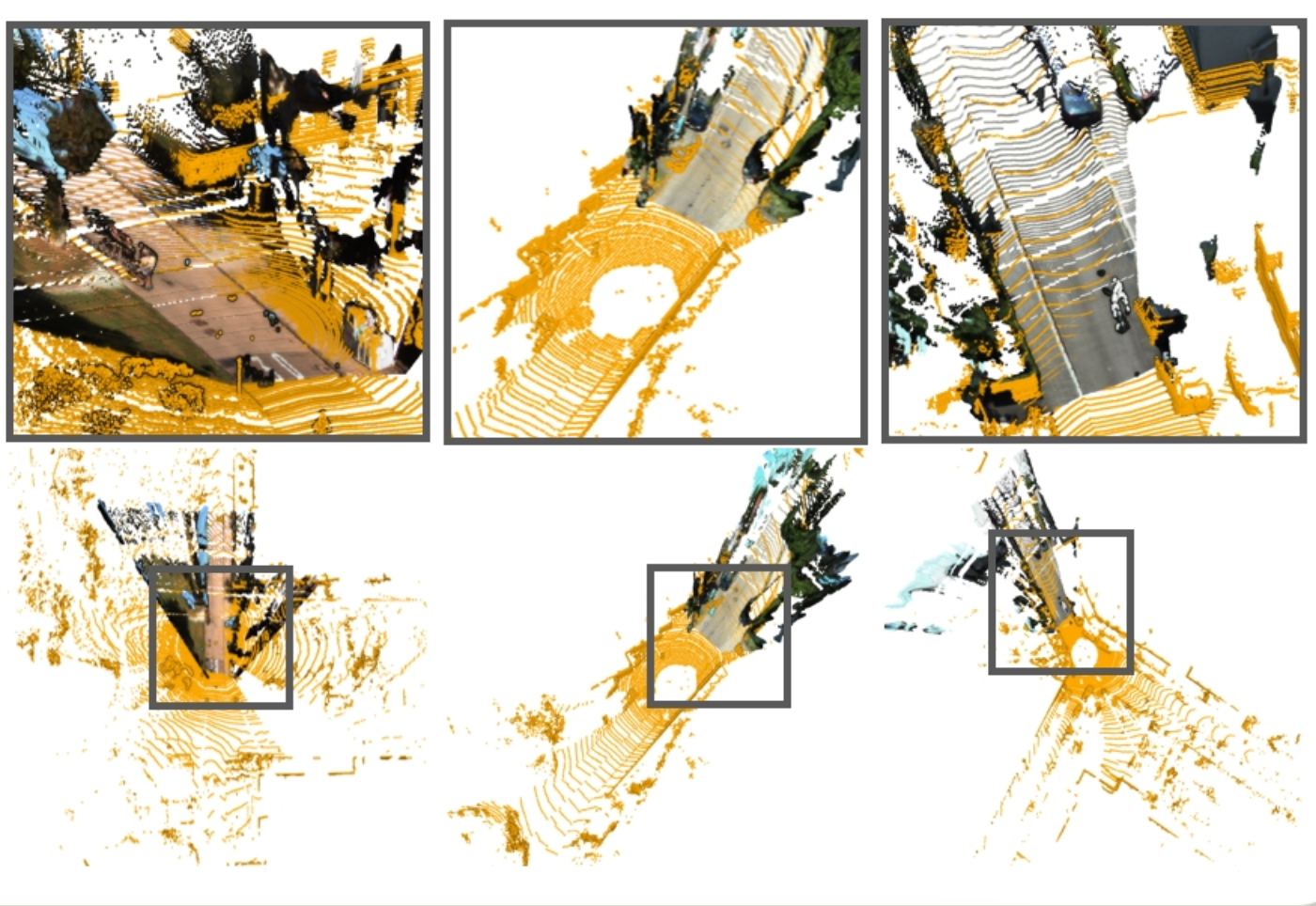
FreeReg':' Image-to-Point Cloud Registration Leveraging Pretrained Diffusion Models and Monocular Depth Estimators
Haiping Wang*, Yuan Liu*, Bing Wang, Yujing Sun, Zhen Dong†, Wenping Wang, Bisheng Yang†
Image-to-Point Cloud Registration
International Conference on Learning Representations (ICLR) 2024
FreeReg extracts cross-modality features from pretrained diffusion models and monocular depth estimators for accurate zero-shot image-to-point cloud registration.
A novel method for registration of MLS and stereo reconstructed point clouds
Xiaochen Yang*, Haiping Wang*, Zhen Dong†, Yuan Liu, Yuhan Li, Bisheng Yang†
Point Cloud Pariwise Registration
IEEE Transactions on Geoscience and Remote Sensing (T-GRS, IF:8.2) 2024
A fast and robust SO(2)-equivariant point cloud descriptor designed for aligning point clouds confirming 4DoF rigid-transformation such as MLS and TLS data.
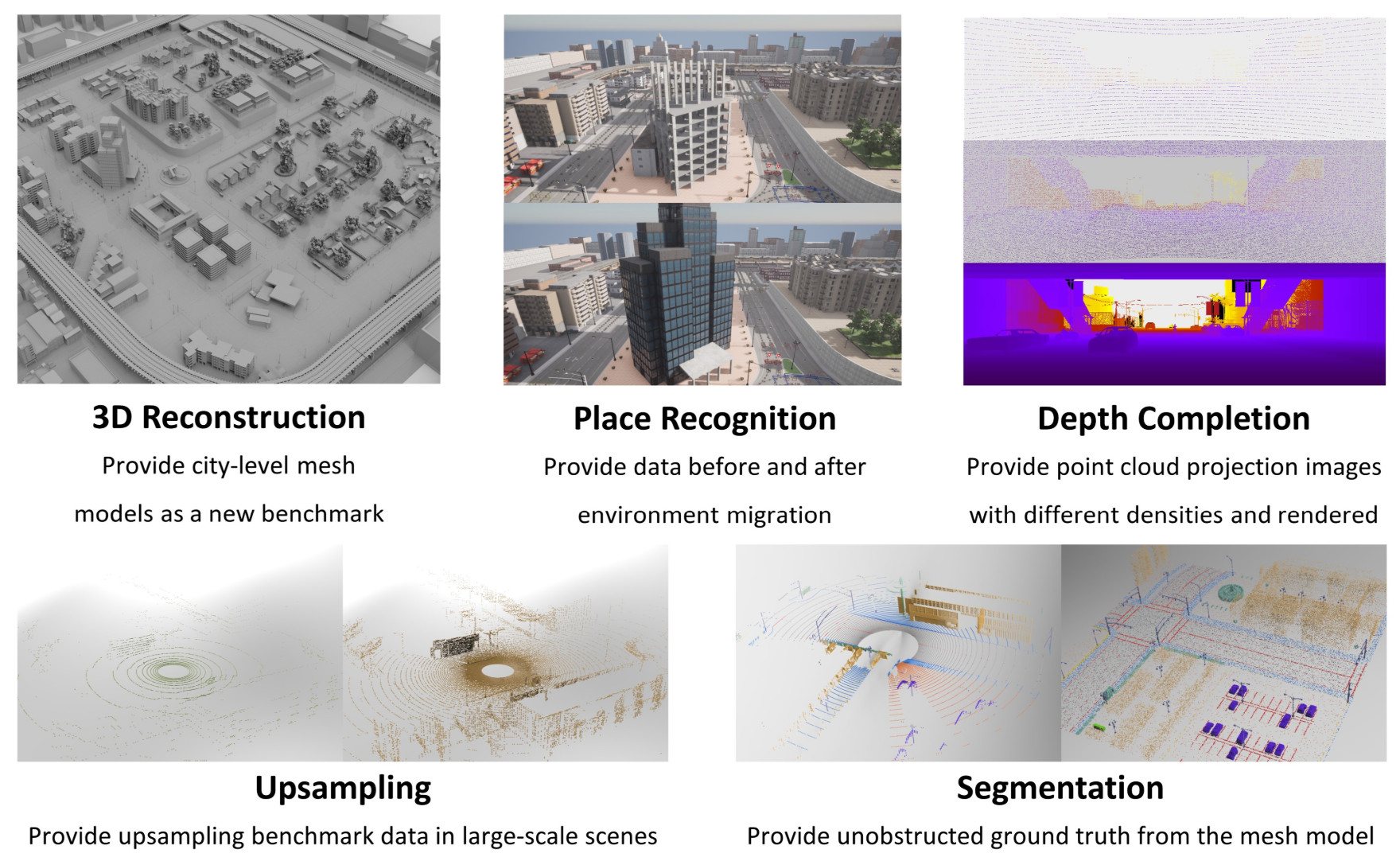
VEnvision3D':' A Synthetic Perception Dataset for 3D Multi-Task Model Research
Jiahao Zhou*, Chen Long*, Yue Xie, Jialiang Wang, Boheng Li, Haiping Wang, Zhe Chen†, Zhen Dong†
3D Dataset
ArXiv 2024
A simulated benchmark for 3D reconstruction, localization, depth completion, upsampling, and segmentation.
2023
PatchAugNet':' Patch feature augmentation-based heterogeneous point cloud place recognition in large-scale street scenes
Xianghong Zou, Jianping Li†, Yuan Wang, Fuxun Liang, Weitong Wu, Haiping Wang, Bisheng Yang†, Zhen Dong
Point Cloud Localization
ISPRS Journal of Photogrammetry and Remote Sensing (IF: 12.7) 2023
A cross-platform point cloud localization baseline, with target point cloud from Mobil Lidar System (MLS) and query point cloud from Helmet-based Lidar System.
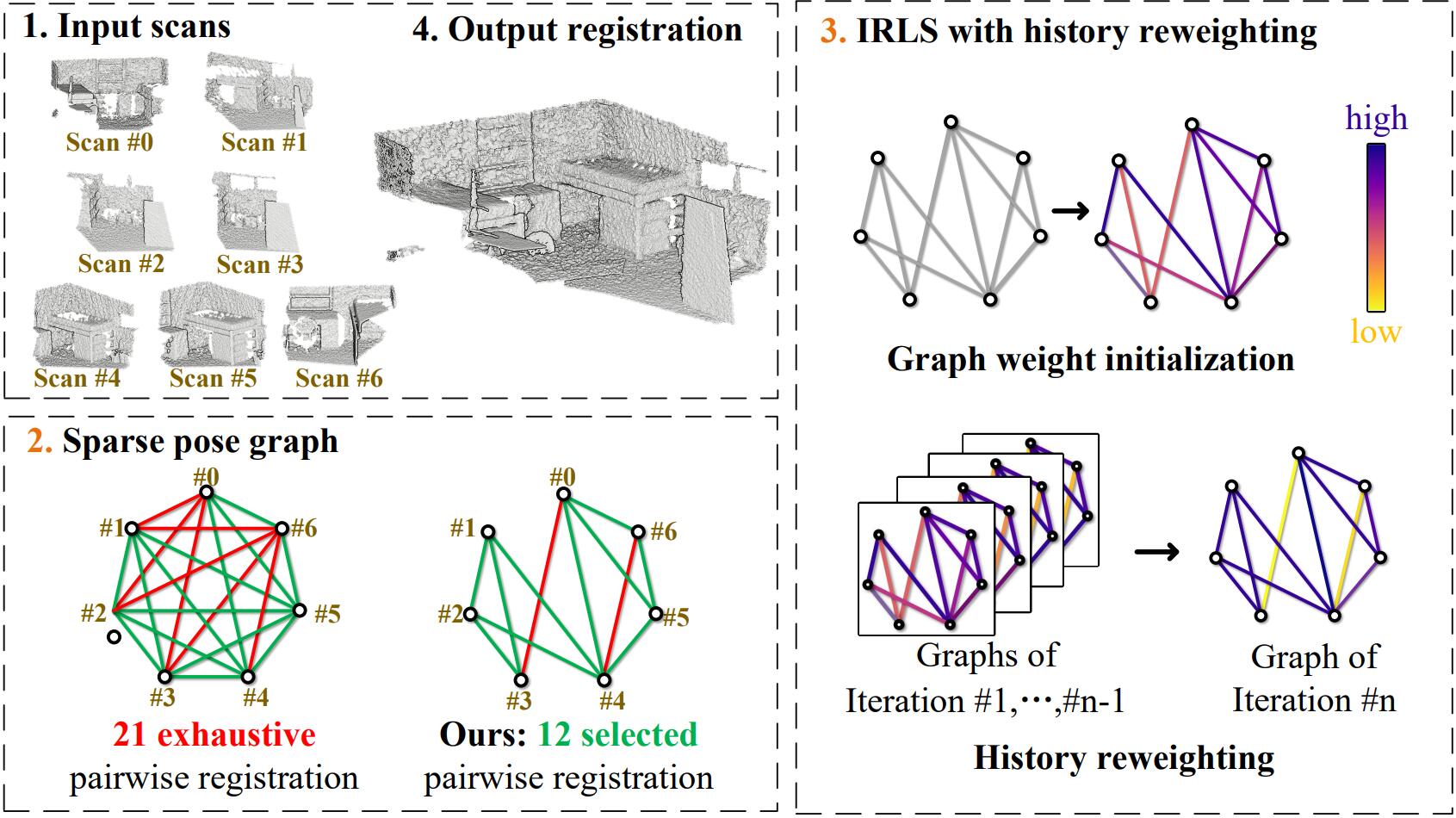
Robust Multiview Point Cloud Registration with Reliable Pose Graph Initialization and History Reweighting
Haiping Wang*, Yuan Liu*, Zhen Dong†, Yulan Guo, Yu-Shen Liu, Wenping Wang, Bisheng Yang†
Point Cloud Multiview Registration
The IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR) 2023
A simple and effective multiview point cloud registration method containing a sparse pose graph construction and a robust IRLS method, achieving SoTA registration performances on the 3D(Lo)Match, ScanNet, and ETH datasets (2023).
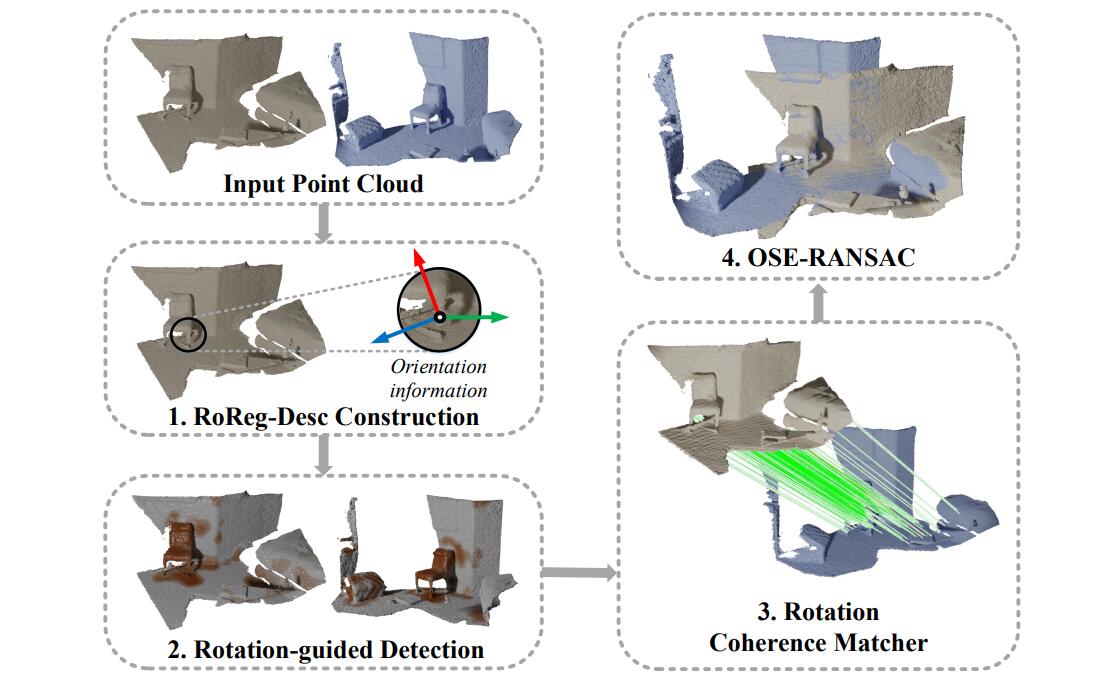
RoReg':' Pairwise Point Cloud Registration with Oriented Descriptors and Local Rotations
Haiping Wang*, Yuan Liu*, Qingyong Hu, Bing Wang, Jianguo Chen, Zhen Dong†, Yulan Guo, Wenping Wang, Bisheng Yang†
Point Cloud Pariwise Registration
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI, IF:24.3) 2023
Group-based rotation-equivariance can benefit each components of point cloud registration, including feature extraction, feature detection, feature matching, and transformation estimation. RoReg achieves SoTA registration performances on the 3D(Lo)Match and ETH datasets (2023).
2022
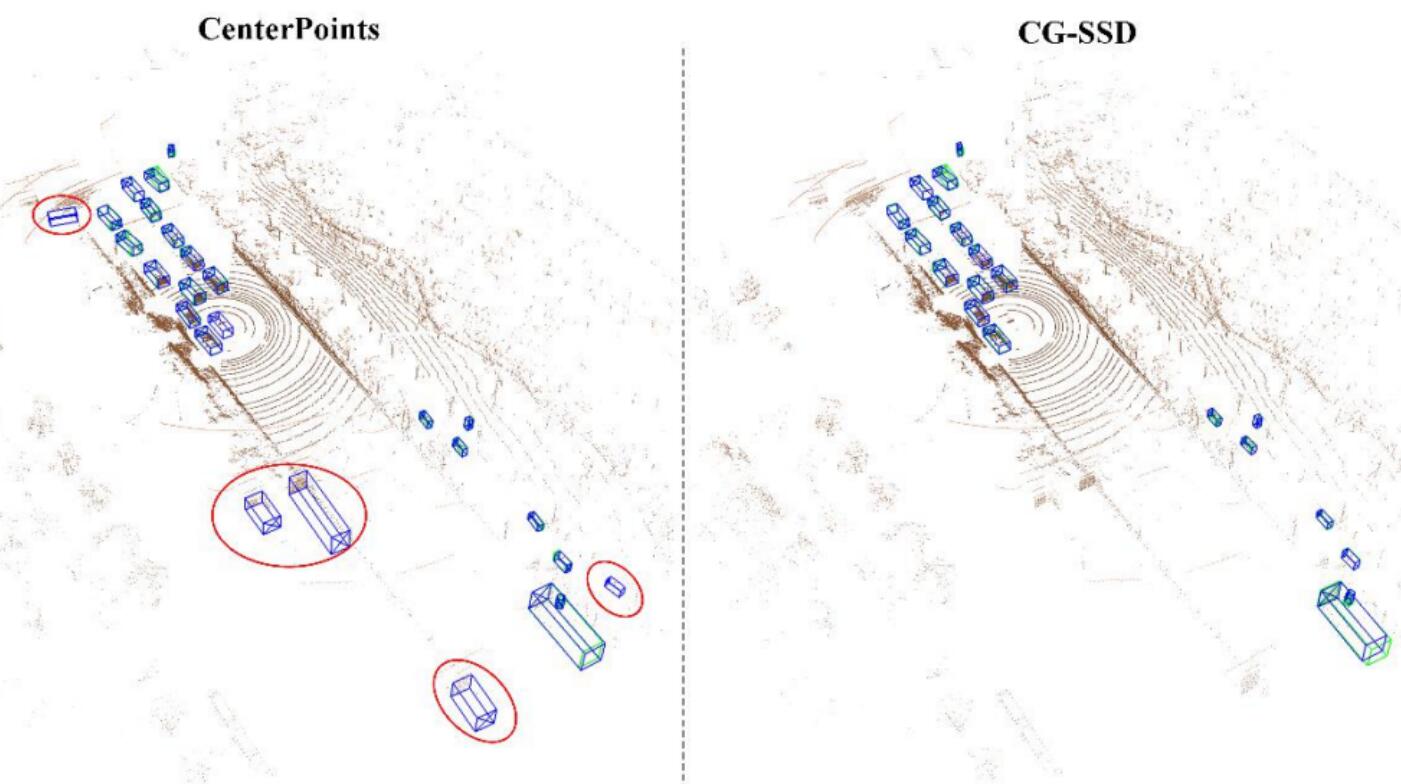
CG-SSD':' Corner guided single stage 3D object detection from LiDAR point cloud
Ruiqi Ma, Chi Chen†, Bisheng Yang, Deren Li, Haiping Wang, Yangzi Cong, Zongtian Hu
3D Detection
ISPRS Journal of Photogrammetry and Remote Sensing (IF: 12.7) 2022
A corner detection-based Lidar point cloud object detection module that can be plugged in to enhance the performance of any baseline.
You Only Hypothesize Once':' Point Cloud Registration with Rotation-equivariant Descriptors
Haiping Wang*, Yuan Liu*, Zhen Dong†, Wenping Wang
Point Cloud Pariwise Registration
ACM Multimedia (MM) 2022
Endow local descriptors of point clouds with rotation equivariance based on the icosahedral group learning, achieving SoTA registration performances on the 3D(Lo)Match, ETH, and WHU-TLS datasets (2022).